Publicación semestral • ISSN 2683-2968 • Noviembre 2023 • Número de revista 8
Publicación semestral • ISSN 2683-2968 • Noviembre 2023 • Número de revista 8
5/7
Una vez completados los pasos para implementar la clasificación y la detección de las fresas por el robot autónomo, el funcionamiento del robot se realiza de acuerdo a lo mostrado en la Figura 8. En esta figura se observa cómo el rover navega paralelo a las fresas, y gracias a la cámara estereoscópica ubicada en su costado, a medida que avanza, el sistema identifica las fresas en su campo de visión, calcula su centroide y, mediante transformaciones geométricas, determina su posición local y global.

Figura 8. Rover detectando fresas en un entorno natural. En la esquina inferior derecha se puede ver la imagen capturada con las coordenadas del centroide de la fresa detectada (si, si).
Sorprendentemente, el sistema logra detectar el 72% de las fresas totales en el campo y alcanza una precisión de detección del 93.75% en los escenarios más complejos como se ve en la Figura 9. Estos resultados superaron a los obtenidos por otros sistemas similares [11], [12]. Además, la colaboración con Huawei-UNAM generó valiosas oportunidades y lecciones aprendidas en términos de capacidades tecnológicas y transferencia tecnológica. Un ejemplo concreto de esto es la generación de código en GitHub, disponible para su uso por otros investigadores, la industria agrícola y estudiantes interesados en el desarrollo de soluciones similares.

Figura 9: Se muestra la detección de fresas maduras en el campo utilizando el rover. Se puede apreciar las fresas maduras, mientras que las fresas inmaduras se han ignorado.
Adicionalmente, el sistema demostró ser eficiente en términos de velocidad de detección, procesando 23 imágenes por segundo, lo que demuestra que la integración de este tipo de robots autónomos es eficaz. Con esto se permite la navegación autónoma en el campo y la obtención de imágenes de alta calidad para su análisis posterior.
Por último, se calcula la posición de las fresas y se colocan en un mapa distinguiendo su nivel de maduración, facilitando al agricultor la identificación de su cosecha. La Figura 10 ilustra el proceso completo de este sistema: detección de la fresa mediante Deep Learning, extracción de información de intensidad para definir madurez, identificación de posición respecto al vehículo, su transformación a coordenadas globales y, finalmente, visualización de detecciones y ubicaciones en un mapa.
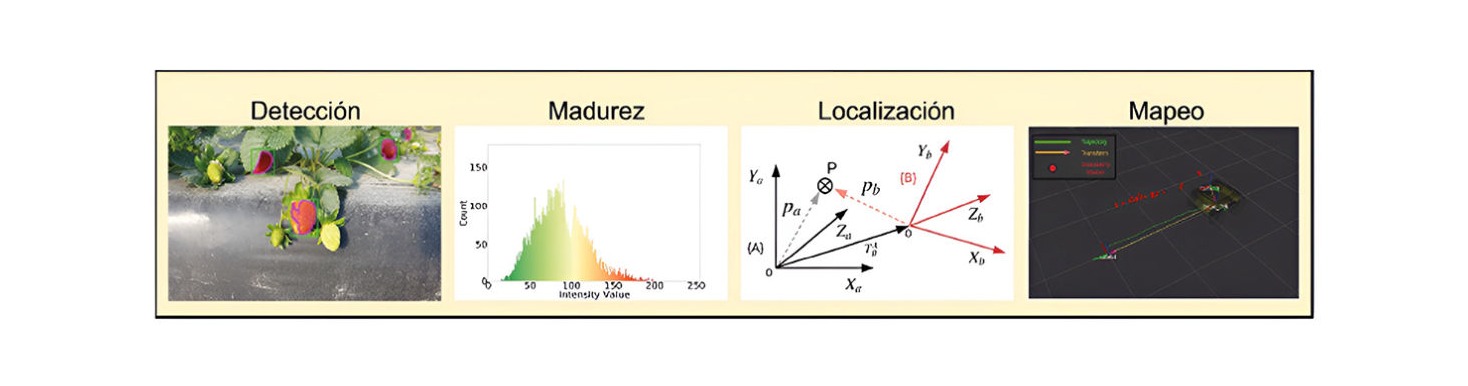
Figura 10. Se muestra una visión general del sistema completo propuesto, que consta de varios componentes clave.
Fecha de recepción: julio de 2023
Fecha de publicación: noviembre de 2023

HTML Editor