Publicación semestral • ISSN 2683-2968 • Noviembre 2023 • Número de revista 8
Publicación semestral • ISSN 2683-2968 • Noviembre 2023 • Número de revista 8
4/7
La columna vertebral de este proyecto es el vehículo robótico terrestre, ya que en él se monta y aplica el hardware y software desarrollado. Si bien las redes neuronales convolucionales son muy útiles, requieren de un alto nivel de procesamiento computacional y, por lo tanto, necesitan equipos de mayor tamaño y consumo de energía. Esto dificulta el uso de vehículos compactos que puedan trasladarse entre los surcos del campo. La solución a esto es el uso de computadoras embebidas, en este caso la Jetson Xavier, que pueden procesar una gran cantidad de información gracias a su GPU integrada. Con esto, se tiene la capacidad de ejecutar algoritmos de Deep Learning sin necesidad de estar conectado a equipos externos. Además, su bajo consumo de energía facilita su uso con baterías, lo que la hace ideal para su integración en robots autónomos y en tareas de monitoreo.
El terreno en el que se trabajará, mostrado en la Figura 6, es representativo de la mayoría de los cultivos en México, con un suelo irregular y espacios estrechos. Por esta razón, se seleccionó un Trail Crawler modelo TRX-4 de la marca Traxxas® adaptado para convertirse en un vehículo tipo rover.
Figura 6: Plantío de fresas en Pénjamo, Guanajuato, México.
Una vez que se tiene el vehículo adecuado, es necesario adaptarlo para que se convierta en un robot autónomo, aquí es donde la instrumentación cobra importancia. Este vehículo se ha equipado con un controlador automático y otros sensores como GPS, una cámara ]estereoscópica ZED mini, ver Figura 7. Así, el rover puede navegar automáticamente mediante un programa de planificación de trayectoria o manualmente con un control remoto.
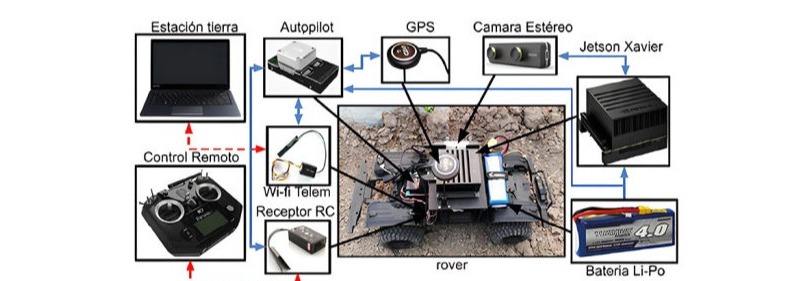
Figura 7: Componentes principales del vehículo.
Lo más importante es que estas características hacen que el rover sea ligero y compacto, lo que le permite navegar fácilmente por el campo de fresas, recolectando información importante y fiable de las fresas. Este robot podría ser una herramienta valiosa para la investigación agrícola y un ejemplo de cómo la tecnología puede contribuir al avance en este sector.
Fecha de recepción: julio de 2023
Fecha de publicación: noviembre de 2023

Landing Page Software